The Canadian Robotics and Artificial Intelligence Ethical Design Lab
Transforming engineering practice and policymaking through transdisciplinary research on the sociotechnical and ethical aspects of robotics and AI
Research
At CRAiEDL, we bridge the worlds of ethics, engineering design, and policy with practical research aimed at supporting responsible robotics and AI development, deployment, and governance.
Robotics and AI Policy
CRAiEDL STEAM Collective
Ethical Design Tools
Automated Mobility
Healthcare Robotics and AI
Autonomous Weapons Systems
News
Connecting the Social Sciences and Humanities to AI Policy
The social sciences and humanities offer unique and vital perspectives to inform government decision-making. Their subject matter and critical approaches help us better understand social, cultural
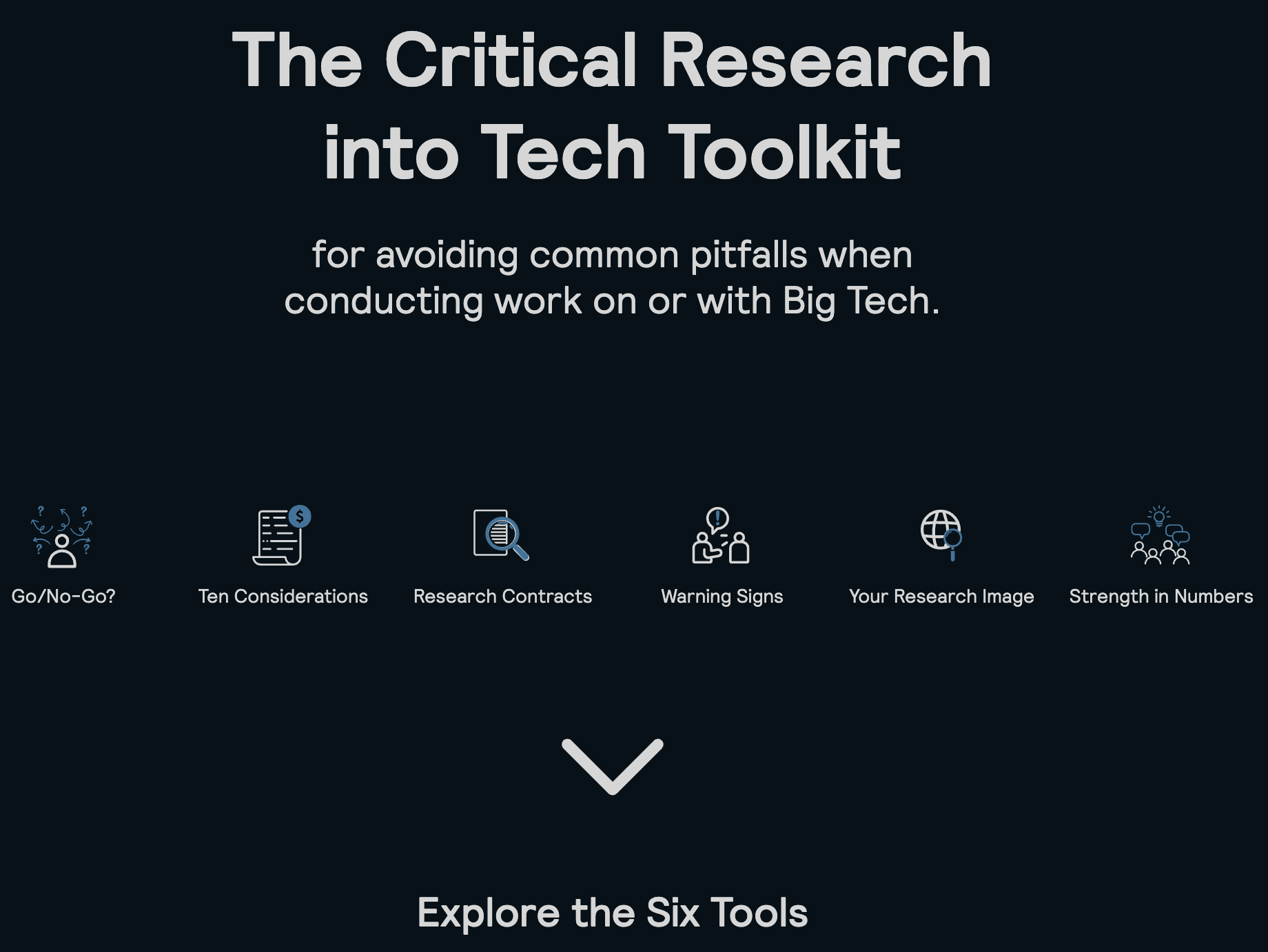
CRAiEDL Releases the CRiT Toolkit
The CRiT Toolkit offers researchers guidance on navigating collaborations with major technology companies, highlighting potential ethical issues and outlining strategies to mitigate risks.
Jason Millar at SciPol 102
The first session of the Ottawa Science Policy Network's annual science policy seminar series, SciPol 102, is focused on the fast-evolving topic of AI.

Shaping Responsible AI
Dr. Bronson and Dr. Millar developed a set of guiding principles, around which they developed a model process for the Canadian Government to lead peer reviews of their automated decision-making

WeRobot 2024
Dr. Jason Millar chairs the panel "Ethical red flags – are their robotic applications that should be banned or considered high-risk?" at WeRobot 2024.
Critical Pedagogies Annual Lecture
The 2024 Annual Lecture was given by Caitlin Heppner on May 6th. Caitlin Heppner delivers the 2024 annual lecture for the Critical Pedagogies Project at the University of Westminster.

SSHRC Grant 2024
CRAiEDL receives SSHRC funding for Art, Ethics, AI & Robotics Research.

Art in Silico @ Michigan Tech.
Chantal Rodier invited keynote speaker for Art in Silico at Michigan Tech. University.
CRAiEDL is proudly supported by